Cookie Consent by
Free Privacy Policy website
Login
Home
fashion
world news
sport
technology
health
ar
Privacy Policy
world news
world news
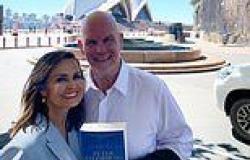
Bruce Lehrmann is ordered to pay Peter FitzSimons a surprising sum in latest ... trends now
(dailymail)
Friday 26th April 2024 04:51 AM
Judo Bank boss Warren Hogan declares Reserve Bank will hike interest rates ... trends now
world news
(dailymail)
Friday 26th April 2024 04:42 AM
Westfield Bondi Junction attack: Ssecurity guard reveals how he tackled the ... trends now
world news
(dailymail)
Friday 26th April 2024 04:24 AM
Atlassian co-founder Scott Farquhar steps down in shock announcement trends now
world news
(dailymail)
Friday 26th April 2024 04:15 AM
fashion
fashion
JoJo Siwa joins former co-stars Kendall Vertes, Chloe Lukasiak and Kalani ... trends now
(dailymail)
Friday 26th April 2024 05:00 AM
Fantasia Barrino gets a kiss from husband Kendall Taylor and mingles with Dua ... trends now
fashion
(dailymail)
Friday 26th April 2024 04:51 AM
Kelly Ripa and husband Mark Consuelos put on a cozy display as they dress to ... trends now
fashion
(dailymail)
Friday 26th April 2024 04:42 AM
fashion
Kellie Pickler's late husband Kyle Jacobs owned 11 firearms, custom knives, and ... trends now
(dailymail)
Friday 26th April 2024 04:33 AM
Michael J. Fox gazes adoringly at wife Tracy Pollan on red carpet before being ... trends now
fashion
(dailymail)
Friday 26th April 2024 04:33 AM
Da'Vine Joy Randolph is a golden girl as she is honored at Time 100 Gala after ... trends now
fashion
(dailymail)
Friday 26th April 2024 04:24 AM
health
Almost 100,000 elderly patients endure 12-hour waits on A&E trolleys, with one ... trends now
(dailymail)
Friday 26th April 2024 12:30 AM
'Game-changer' cancer jab offers hope of a cure: NHS launches trial of world's ... trends now
(dailymail)
Friday 26th April 2024 12:12 AM
Warning over explosion of strokes in next decade: Analysis projects 50% ... trends now
(dailymail)
Friday 26th April 2024 12:12 AM
Warning for Kim Kardashian's beloved 'vampire facials' after four women ... trends now
(dailymail)
Thursday 25th April 2024 11:00 PM
Why men on Ozempic are reporting a NEW highly embarrassing sex side effect trends now
(dailymail)
Thursday 25th April 2024 10:15 PM
First new antibiotic for UTIs in 20 years approved to help millions of women ... trends now
(dailymail)
Thursday 25th April 2024 09:30 PM
sport
Chiefs NFL Draft grades 2024: Kansas City snags WR Xavier Worthy after trading up with AFC rival Bills
sport
cbssports
Friday 26th April 2024 04:58 AM
sport news Xavier Worthy goes to the Kansas City Chiefs at No. 28 as two-time defending ... trends now
sport
(dailymail)
Friday 26th April 2024 04:42 AM
Dolphins NFL Draft grades 2024: Miami picks Chop Robinson in first round, adding needed pass rusher to defense
sport
cbssports
Friday 26th April 2024 04:31 AM
Flanagan takes aim at the Cronulla Sharks mogaznewsen
sport
The Sydney Morning Herald
Friday 26th April 2024 04:27 AM
sport news Caleb Williams and new Bears teammate Rome Odunze share touching moment at 2024 ... trends now
sport
(dailymail)
Friday 26th April 2024 04:24 AM
sport news Footy star Chad Wingard shares huge announcement about his love life after ... trends now
sport
(dailymail)
Friday 26th April 2024 04:15 AM
technology
technology
East Coast of US at greater risk of flooding - thanks to 'dangerously weak' ... trends now
(dailymail)
Thursday 25th April 2024 09:30 PM
Scientists GROW diamonds in just 150 minutes that could cost $2,000 less than ... trends now
technology
(dailymail)
Thursday 25th April 2024 08:00 PM
Scientists reveal how long YOU should walk to boost brain power trends now
technology
(dailymail)
Thursday 25th April 2024 06:48 PM
UFO or drone? 'Flying cylinder' spotted soaring over New York City's LaGuardia ... trends now
technology
(dailymail)
Thursday 25th April 2024 06:12 PM
collection
collection
Anglo American share price spike raises questions as BHP pursues takeover of ...
ABC online
Friday 26th April 2024 04:28 AM
Scott Morrison says he took medication for anxiety as prime minister
collection
ABC online
Friday 26th April 2024 01:10 AM
Australia's tax rate increase was the biggest in the world last year, and those ...
collection
ABC online
Friday 26th April 2024 12:43 AM
Live: Price data pushes out US rate cut chances, while AUD pushes above 100 ...
collection
ABC online
Thursday 25th April 2024 10:46 PM
insurance
insurance
Boom in the USA of low cost insurance
Saturday 03rd December 2022 08:44 PM
10 Information about insurance zanesville ohio
insurance
Monday 28th November 2022 10:33 PM
jeddah service
2024 ©