Cookie Consent by
Free Privacy Policy website
Login
Home
fashion
world news
sport
technology
health
ar
Privacy Policy
world news
world news
Shepparton, Victoria: Fatal crash at Arcadia brings traffic to a standstill on ... trends now
(dailymail)
Friday 26th April 2024 06:48 AM
Cackling non-binary Columbia encampment leader says 'Zionists don't deserve to ... trends now
world news
(dailymail)
Friday 26th April 2024 06:39 AM
Australia is rocked by another alleged shopping centre stabbing as police swoop ... trends now
world news
(dailymail)
Friday 26th April 2024 06:39 AM
Tesla's futuristic-looking 'Cybertruck' spotted on Australian streets despite ... trends now
world news
(dailymail)
Friday 26th April 2024 06:39 AM
fashion
fashion
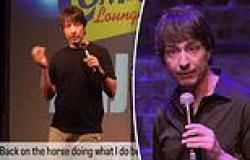
Arj Barker addresses backlash over ejecting a breastfeeding mother from his ... trends now
(dailymail)
Friday 26th April 2024 06:48 AM
Rebecca Judd shows off her toned figure in a black bra and leggings from her ... trends now
fashion
(dailymail)
Friday 26th April 2024 06:30 AM
Ellen DeGeneres admits being branded the 'most hated person in America' was a ... trends now
fashion
(dailymail)
Friday 26th April 2024 06:30 AM
fashion
Jersey Shore Family Vacation: The Arizona vacation gets off to an awkward start ... trends now
(dailymail)
Friday 26th April 2024 06:12 AM
Pregnant influencer Em Davies reveals the exact date she and fiancé Joel ... trends now
fashion
(dailymail)
Friday 26th April 2024 06:12 AM
Fifth Harmony star Lauren Jauregui 'exploring polyamory' after split from ... trends now
fashion
(dailymail)
Friday 26th April 2024 06:03 AM
health
Almost 100,000 elderly patients endure 12-hour waits on A&E trolleys, with one ... trends now
(dailymail)
Friday 26th April 2024 12:30 AM
'Game-changer' cancer jab offers hope of a cure: NHS launches trial of world's ... trends now
(dailymail)
Friday 26th April 2024 12:12 AM
Warning over explosion of strokes in next decade: Analysis projects 50% ... trends now
(dailymail)
Friday 26th April 2024 12:12 AM
Warning for Kim Kardashian's beloved 'vampire facials' after four women ... trends now
(dailymail)
Thursday 25th April 2024 11:00 PM
Why men on Ozempic are reporting a NEW highly embarrassing sex side effect trends now
(dailymail)
Thursday 25th April 2024 10:15 PM
First new antibiotic for UTIs in 20 years approved to help millions of women ... trends now
(dailymail)
Thursday 25th April 2024 09:30 PM
sport
sport news Souths boss Jason Demetriou makes stunning confession as calls grow for him to ... trends now
sport
(dailymail)
Friday 26th April 2024 06:48 AM
sport news Pep Guardiola insists only perfection will secure Man City the Premier League ... trends now
sport
(dailymail)
Friday 26th April 2024 06:48 AM
2024 NFL Draft: Five biggest surprises of the first round, including QB records broken and defenders ignored
sport
cbssports
Friday 26th April 2024 06:46 AM
sport news Bill Belichick reveals weekly guest spots on Pat McAfee's ESPN show this ... trends now
sport
(dailymail)
Friday 26th April 2024 06:39 AM
2024 NFL Draft Round 1 winners and losers: Four quarterbacks come out on top, one has a bad day
sport
cbssports
Friday 26th April 2024 06:37 AM
Why this sport pivoted away from skin fold testing years ago
sport
ABC online
Friday 26th April 2024 06:25 AM
technology
technology
East Coast of US at greater risk of flooding - thanks to 'dangerously weak' ... trends now
(dailymail)
Thursday 25th April 2024 09:30 PM
Scientists GROW diamonds in just 150 minutes that could cost $2,000 less than ... trends now
technology
(dailymail)
Thursday 25th April 2024 08:00 PM
Scientists reveal how long YOU should walk to boost brain power trends now
technology
(dailymail)
Thursday 25th April 2024 06:48 PM
UFO or drone? 'Flying cylinder' spotted soaring over New York City's LaGuardia ... trends now
technology
(dailymail)
Thursday 25th April 2024 06:12 PM
collection
collection
'Thought it was nothing': NBA star reveals battle with rare facial paralysis ...
ABC online
Friday 26th April 2024 06:34 AM
Australian-born judge David Lambourne closer to deportation from Kiribati
collection
ABC online
Friday 26th April 2024 05:31 AM
Raise JobSeeker by $17 a day, advisory committee tells government
collection
ABC online
Friday 26th April 2024 05:22 AM
Anglo American share price spike raises questions as BHP pursues takeover of ...
collection
ABC online
Friday 26th April 2024 04:28 AM
insurance
insurance
Boom in the USA of low cost insurance
Saturday 03rd December 2022 08:44 PM
10 Information about insurance zanesville ohio
insurance
Monday 28th November 2022 10:33 PM
jeddah service
2024 ©